Serial Port class driver, #include <aery32/serial_port_clsdrv.h>¶
Serial Port class driver implements serial port communication using USART module functions and Peripheral Input/Output DMA class drivers. The driver can be used to communicate with PC via COM port or with other integrated chips (ICs) which provide RX and TX signal pins. Hardware handshaking (the use of RTS and CTS signal pins), which requires DMA to work, is also supported by the class. Skip to example.
Class instantiation¶
To instantiate a Serial Port class driver you need to tell its constructor which USART module you like to use. Additionally input and output DMA buffers, idma and odma, are needed.
First allocate some space for the the DMA buffers:
volatile uint8_t bufdma0[128] = {};
volatile uint8_t bufdma1[128] = {};
After then instantiate Peripheral DMA class drivers by using the buffers you just created:
periph_idma dma0 = periph_idma(0, AVR32_PDCA_PID_USART0_RX, bufdma0, sizeof(bufdma0));
periph_odma dma1 = periph_odma(1, AVR32_PDCA_PID_USART0_TX, bufdma1, sizeof(bufdma1));
The DMA pid value, which is the second parameter of the periph_idma and periph_odma constructors, defines the USART data direction, so be sure to select Peripheral DMA class’ direction properly.
When DMAs are instatiated, instantiate the Serial Port class driver:
serial_port pc = serial_port(usart0, dma0 /* input */, dma1 /* output */);
pc.enable();
Note
The object name pc was used here, because the connection is intended to be use with PC. See the Setting up the terminal software in PC side below.
By default the speed is set to 115200 bit/s (baud error 0.16% with 66 MHz PBA frequency). The default setting for parity is none. Stop and data bits are 1 and 8, respectively. All these settings can be changed with the class member functions.
To change speed call
pc.set_speed(speed); // speed in bit/s
Everytime you change the speed, the baud error rate is set to the public error member and can be checked by calling pc.error.
Parity and stop bits can be set like this:
pc.set_parity(USART_PARITY_NONE);
pc.set_stopbits(USART_STOPBITS_1);
The possible parity options are USART_PARITY_EVEN, USART_PARITY_ODD, USART_PARITY_MARKED and USART_PARITY_SPACE. The number of stop bits can be USART_STOPBITS_1, USART_STOPBITS_1p5 or USART_STOPBITS_2.
The Serial Port class driver supports several data bits values from 5 to 9. Generally 8 data bits is used, but it can be changed with set_databits() member function:
pc.set_databits(USART_DATABITS_5);
Warning
Keep in mind that if 9 data bits is used, you also have to change the size of transfer of the used periph_idma and periph_odma class drivers, because 9 bits do not fit in one byte, which is the default DMA transfer size.
Hello World!¶
When the Serial Port class driver is enabled it’s ready to be used. The well known “Hello World!” example would work like this:
pc << "Hello Aery" << 32;
or like this:
pc.printf("Hello Aery%d", 32);
A single character can be read and write like this:
char c = pc.getc();
pc.putc(c);
If you like to put the read character back to the read buffer call
pc.putback(c);
Getline and line termination¶
You can read user input in lines like this:
char line[32] = {};
pc.getline(line);
getline() will extract characters to line C string until either the DMA input buffer is full or the delimiting character, which is \r\n by defaut, is found. Characters that precede the char (del), which is a backspace (decimal value 127), are discarded from the line.
The total number of the read characters can be saved like this:
size_t nread;
pc.getline(line, &nread);
Delimitation character and \0 aren’t added to nread.
The default delim can be set by calling set_default_delim() member function in this way:
pc.set_default_delim('\n');
pc.set_default_delim("\r\n");
Note that the delimitation character delim can be either a single character or two sequential characters. If you need to use occasionally some other delimitation character, define it as a third argument like this:
pc.getline(line, &nread, '\n');
Note
Be specific with the '' and "" notation. For example, set_default_delim("\n"); would set the default line termination to \n\0 instead of \n.
Hint
For input scanning, it’s a good practice first fetch the line and then use sscanf() for that.
int i = 0;
pc.getline(line);
sscanf(line, "%d", &i);
Hint
In main for loop you can skip empty lines in this way
for (;;) {
pc.getline(line, &nread);
if (nread == 0)
continue; // skip
// ...
}
Flush and other supportive functions¶
Sometimes you need to flush the input buffer from all read bytes. This can be done with flush() member function. If you like to know how many bytes have been received, call bytes_available().
It’s also possible that the input buffer gets overflown. This can be checked by calling has_overflown(). If the buffer has been overflown, you can reset the serial port by calling reset().
Hardware handshaking¶
To enable hardware handshaking just call:
pc.enable_hw_handshaking();
When the handshaking is enabled the receiver drives the RTS pin and the level on the CTS pin modifies the behavior of the transmitter.
Setting up the terminal software in PC side¶
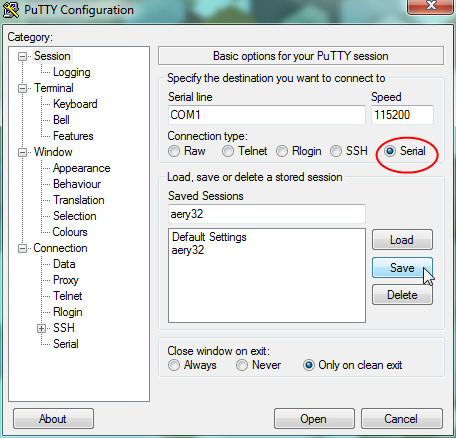
There are several free terminal emulator software which to use in Windows. PuTTY and Tera Term are most known and widely used.
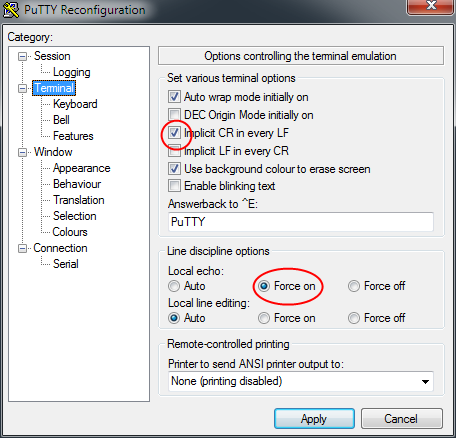
If you choose to use PuTTY, select serial and set up the port (serial line) and speed. Before saving the session go to the Terminal slide and enable Implicit CR in every LF. Additionally force the local echo to see what you type. Use CTRL+J to send lines instead of pressing ENTER.